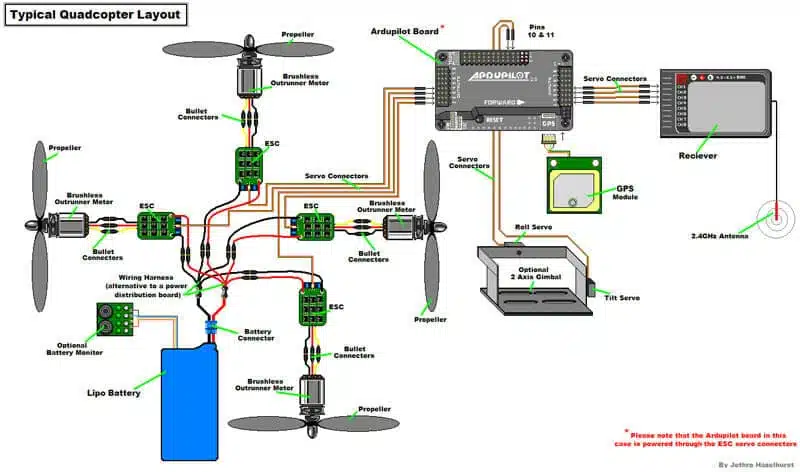
In dit stuk zal ik proberen uit te leggen met welke componenten een drone is opgebouwd en hoe deze met elkaar samenwerken. Een drone bestaat uit veel verschillende (elektronische) componenten die samenwerken om te zorgen dat de drone stabiel in de lucht blijft hangen. Hieronder behandel ik de basis componenten waaruit de meeste drones zijn opgebouwd.
DE Flight controler
De drones waarmee wij werken zijn ook bekend onder de naam multicopters. Multicopters vliegen door middel van meerdere propellors die per stuk ongeveer 400 keer per seconde worden aangestuurd door een boordcomputer. De boordcomputer meet voortdurend alle verstoringen die bijvoorbeeld door wind worden veroorzaakt, aan de hand van deze metingen corrigeert de boordcomputer (flightcontroller) de drone door de motoren onafhankelijk sneller of langzamer te laten draaien. Als er geen input word gegeven vanaf de afstandsbediening zal de drone proberen horizontaal te blijven hangen. Bekende flightcontrollers die in veel professionele apparaten worden gebruikt zijn de DJI Wookong-M en de Mikrokopter flightcontroller
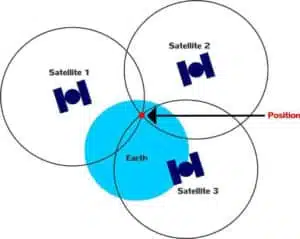
GPS
Tegenwoordig worden de meeste drones uitgerust met een GPS module die de positie van de drone meet. Door deze functie kan de drone zonder dat de gebruiker input geeft op dezelfde plaats blijven hangen. De flightcontroller ontvangt de coördinaten en zal proberen de drone te corrigeren om zo op de zelfde plek te blijven hangen. Naast de positie bepaling is het bij de meeste drones ook een mechanisme waarmee de drone kan terugkeren naar de plek waar deze is opgestegen in het geval de bestuurder de verbinding verliest met de drone. De GPS module is onderdeel van de flightcontroller maar is vaak optioneel.
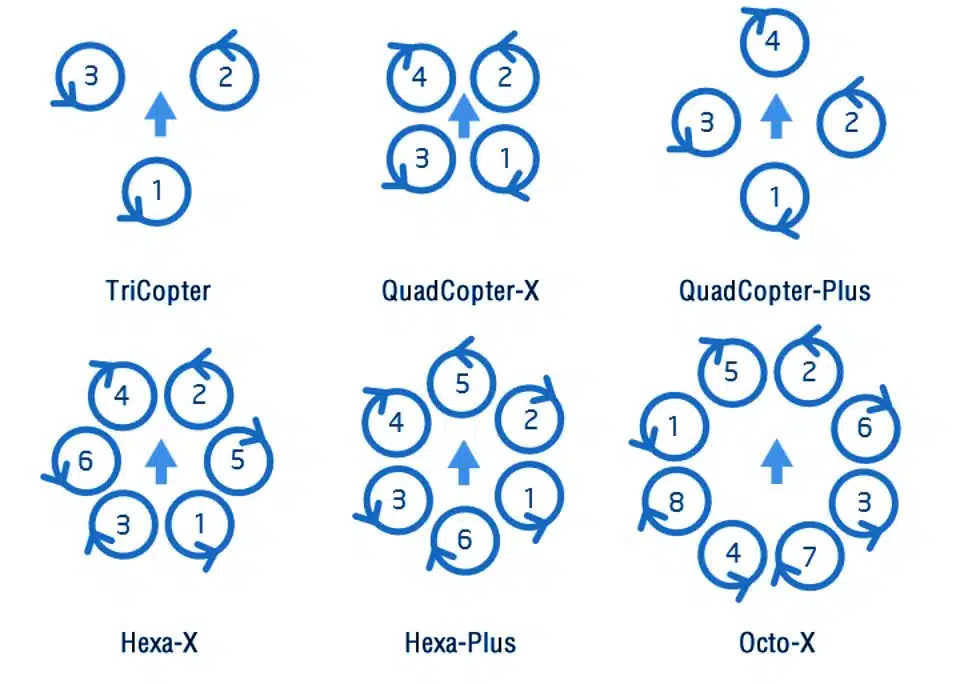
MOTOREN EN CONFIGURATIE
Multicopters (drones) kunnen worden uitgerust met 3 tot 12 propellors/motoren. De modellen hebben de volgende namen: tricopter (3), quadcopter (4), hexacopter (6), octocopter (8) en duodeca (12). Meer motoren/propellors zijn ook mogelijk maar zijn binnen de industrie minder gangbaar. De motoren die worden gebruikt zijn in bijna alle gevallen zogenaamde brushless electro motoren. Deze motoren hebben geen koolborstels (brushes) en zijn minder onderhevig aan slijtage dan reguliere elektromotoren. Daarnaast hebben deze motoren een veel hogere efficiëntie en precisie. Tegenwoordig is de brushless motor eigenlijk de standaard aan het worden en verdwijnt de oude “brushed” elektromotor. Elektrische auto’s, stofzuigers en wasmachines maken tegenwoordig vaak ook gebruik van de brushless elektromotor.
CONFIGURATIE
Een drone heeft altijd een even aantal propellors/motoren waarbij er altijd evenveel rechts- als linksdraaiende propellors/motoren zijn. (uitzondering is de tricopter) Verder zijn er twee verschillende setups mogelijk namelijk “flat” of “coaxiaal”. Flat wil zeggen dat alle propellors naast elkaar zitten in een vaak ronde opstelling. Bij de coaxiale setup is dit ook het geval maar zitten er per arm twee motoren boven elkaar. Voordeel van een coaxiale setup is dat de grootte van de drone aanzienlijk kleiner word bij een zelfde hoeveelheid lift capaciteit. Daarnaast is het ook zo dat een coaxiale drone veel beter vliegt met harde wind en dus ook veel stabielere beelden kan maken bij meer wind. Op de eerste foto van deze pagina zie je een foto van een zogenaamde x8 coaxiale drone.
ESC (electronic speed controller)
Elke motor van een multicopter word aangestuurd door een Electronic Speed Controller (ESC). Dit is een van de onderdelen van een multicopter die het meest gevoelig is voor eventuele storingen. Dit komt doordat er grote hoeveelheden stroom doorheen gaan en er en computer in zit die het signaal ontvangt vanuit de de flightcontroller. Dit gebeurt bij de meeste multicopters zo’n 400 keer per seconde. Door de grote hoeveelheden stroom moet de ESC goed kunnen omgaan met grote temperatuurverschillen. Bij een grote multicopter van bijv. 12-16kg is dit per motor al gauw 30Ampere (666Watt) per motor (maximale output bij snel stijgen van de drone). Bij een octocopter zou dit dan in totaal om 5328Watt gaan! Goeie ESC’s en motoren zijn van groot belang voor een veilige drone en zijn in de meeste gevallen niet goedkoop.
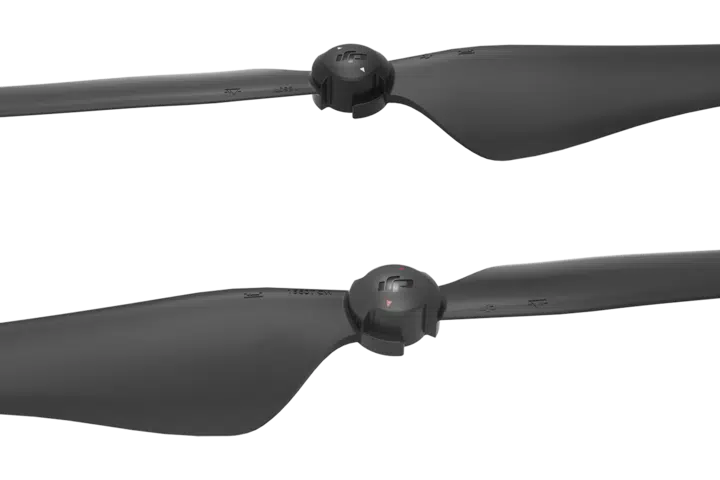
PROPELLORS
Er zijn heel veel verschillende propellors te krijgen. Carbon en hout zijn in veel gevallen het beste als een drone moet worden ingezet voor het maken van video opnames. Dit heeft te maken met de starheid van het materiaal. Dit zorgt voor een hoge efficiëntie en weinig trillingen. Het balanceren van de propellors en motoren van een drone is een van de moeilijkste dingen bij het bouwen van een professionele multicopter. Voor het balanceren bestaan zogenaamde “prop balancers”. Voor echt gebalanceerde motoren en propellors is dynamisch balanceren de beste oplossing, hierover later meer.